

Sign In Join Free


1 / 1
Servo Motor Encoder- GSM48 Series Replacing Tamagawa Fa-coder
| Model No. : | GSM48 |
|---|---|
| Brand Name : | CALT |





Product description
2.revolution up to 5000P/R
3.variety of output
4.good cost-effective
5.UVW encoder
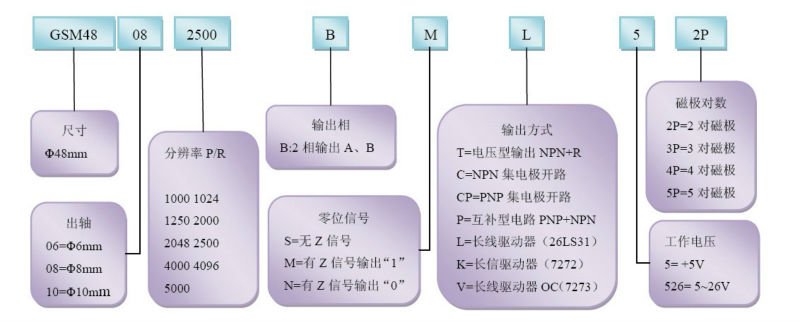
Applications Widely used in the field of automatic control AC servo unit, particularly suitable for use in servo motor supporting Features * Internal ASIC devices, high reliability, long life, strong anti-interference. * Wide range of resolutions, and does not require signal conditioning. * With A, B, Z and U, V, W six-channel signal output can be connected with standard line driver (26LS31) RS422, can provide 12 output signal, and is compatible with TTL Model defined:
 Electrical Characteristics:
Electrical Characteristics: Output circuit | Open-collector output | Voltage output | Push-pull complementary outputs | Line driver |
Supply voltage | 5~26 | 5~26 | 5±0.25 5~26 | 5±0.25 5~26 |
Current consumption | ≤80mA | ≤80mA | ≤80mA | ≤160mA |
Load current | 40mA | 40mA | 40mA | 60mA |
Output high | Min Vcc*70% | Min Vcc-2.5V | Min Vcc-1.5V | Min 3.4V |
Output low | Max 0.4V | Max 0.4V | Max 0.8V | Max 0.4V |
Rise time Tr | MAX 1us | MAX 1us | MAX 1us | MAX 200ns |
Fall time Tf | MAX 1us | MAX 1us | MAX 1us | MAX 200ns |
Highest frequency response | 500kHz | 500kHz | 500kHz | 500kHz |
Max speed r/min | Starting torque | Axis maximum load | Impact | Anti-vibration |
6000 | <0.02Nm | Radial 20N Axial 10N | 50G/11ms | 10G 10~2000HZ |
Moment inertia | Work Temperature | Storage Temperature | Protection Degree | Weight |
4x10-8 | -30~85°C | -40~85°C | IP50 | 120g |
Signal | A | B | Z | A/ | B/ | Z/ | U | V | W | U/ | V/ | W/ | Vcc | GND |
Color | Green | White | Yellow | Green /Black | White /Black | Yellow/ Black | Brown | Gray | Orange | Brown /Black | Gray /Black | Orange /Black | Red | Black |
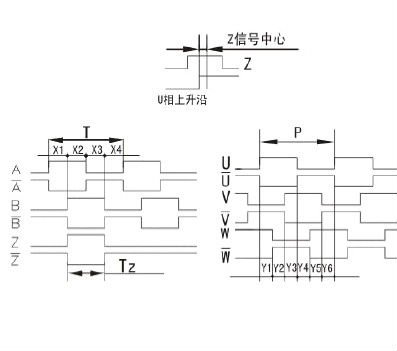
| Waveform ratio= X1+X2=0.5T±0.1T X3+X4=0.5T±0.1T Phase difference= Xn≥0.15T(n=1,2,3,4) Z signal width: Tz=0.5T Signal location accuracy: A, B phase absolute angular error ≤ 0.2T Periodic error ≤ 0.05T T = 360 ° / N (N is the number of pulses per revolution output) Cycle P = 360 ° / N1 ± 1.5 ° (N1 = 2,3,4) Phase differenceYn = P / 6 ± 1.5 ° (n = 1,2,3,4,5,6) A, B phase U, V-phase position makes no provisions Z phase and U phase relationship: C ≤ ± 1 ° (mechanical angle) A phase difference of 90 ° signal with a zero signal. Direction from the shaft end (plate spring) The spindle clockwise rotation CW waveform graph |
 Note: The above dimensions are for reference only, the size of all the encoder refer to the encoder attached in instructions.
Note: The above dimensions are for reference only, the size of all the encoder refer to the encoder attached in instructions.  encoder rotary encoder dc servo motor encoder
encoder rotary encoder dc servo motor encoder 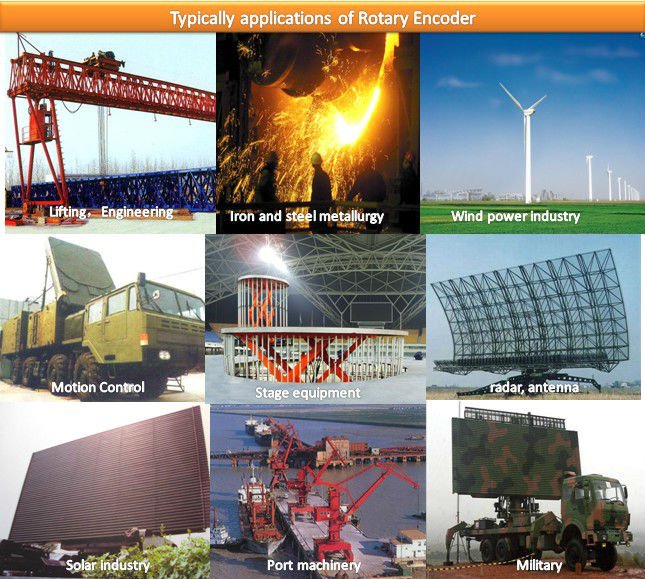
 If you are interested in the above, please do no hesitate to contact us! Servo Motor Encoder- GSM48 Series Replacing Tamag absolute encoder | rotary encoder | Analog encoder | incremental rotary | encoder | optical linear encoder | absolute incremental encoder | incremental optical encoder | linear encoder| optic encoder | rotary encoder | omron e6b2 cwz6c rotary encoder e6b2 | rotary encoder price | absolute rotary encoder | rotary encoder switch | usb rotary encoder | siemens rotary encoder motor incremental encoder rotary awa Fa-coder
If you are interested in the above, please do no hesitate to contact us! Servo Motor Encoder- GSM48 Series Replacing Tamag absolute encoder | rotary encoder | Analog encoder | incremental rotary | encoder | optical linear encoder | absolute incremental encoder | incremental optical encoder | linear encoder| optic encoder | rotary encoder | omron e6b2 cwz6c rotary encoder e6b2 | rotary encoder price | absolute rotary encoder | rotary encoder switch | usb rotary encoder | siemens rotary encoder motor incremental encoder rotary awa Fa-coder Send your inquiry to this supplier
Product Alert
Subscribe to your interested keywords. We will send freely the latest and hottest products to your Inbox. Don't miss any trade information.
Your use of this website constitutes acknowledgement and acceptance of our Terms & Conditions.
Copyright © 2009-2024 Bossgoo Co., Ltd. All rights reserved.
